개요
본 연구는 이동 로봇과 증강현실(AR) 기술을 결합하여 보행 장애 아동의 능동적 보행훈련(재활)을 지원하는 시스템 개발에 관한 연구로,
이동 로봇을 통해 바닥에 가상 콘텐츠를 증강하고, 훈련자는 증강된 콘텐츠와 인터랙션을 수행하며 보행 훈련을 수행함
Lidar 기반 실시간 포인트 클라우드 인식 알고리즘을 통해 사용자의 발 위치 추적하고 가상 콘텐츠와 인터랙션 및 훈련자 보행 속도에 맞춰 로봇 이동
보행 장애 아동의 몰입도·집중도를 높이기 위해 Unity를 기반으로 가상 콘텐츠 개발
연구 목적 & 필요성
신경운동장애 아동의 일상 복귀를 위해서는 반복적이고 정확한 보행훈련이 필수적임,
기존의 물리치료 방식은 치료사의 숙련도와 피로도에 따라 훈련의 재현성과 효율성이 저하되는 한계가 있음
이에 본 연구는 이동로봇과 가상현실(VR) 기반 훈련 콘텐츠를 결합하여 사용자의 움직임을 실시간으로 인식하고 반응하는 보행훈련용 지능형 시스템을 개발함
사용자의 발 위치, 보폭, 보행 패턴 등을 정밀하게 인식하여 훈련 성과를 데이터화하고, 시청각 피드백을 통해 훈련 몰입도 및 참여 의지 향상을 유도함
본 연구는 향후 가상현실 기반 재활훈련 시스템의 고도화 및 보행재활 로봇 상용화에 기여하고, 재활치료 효율성 향상 및 의료 인력 부담 완화에 활용될 수 있음.
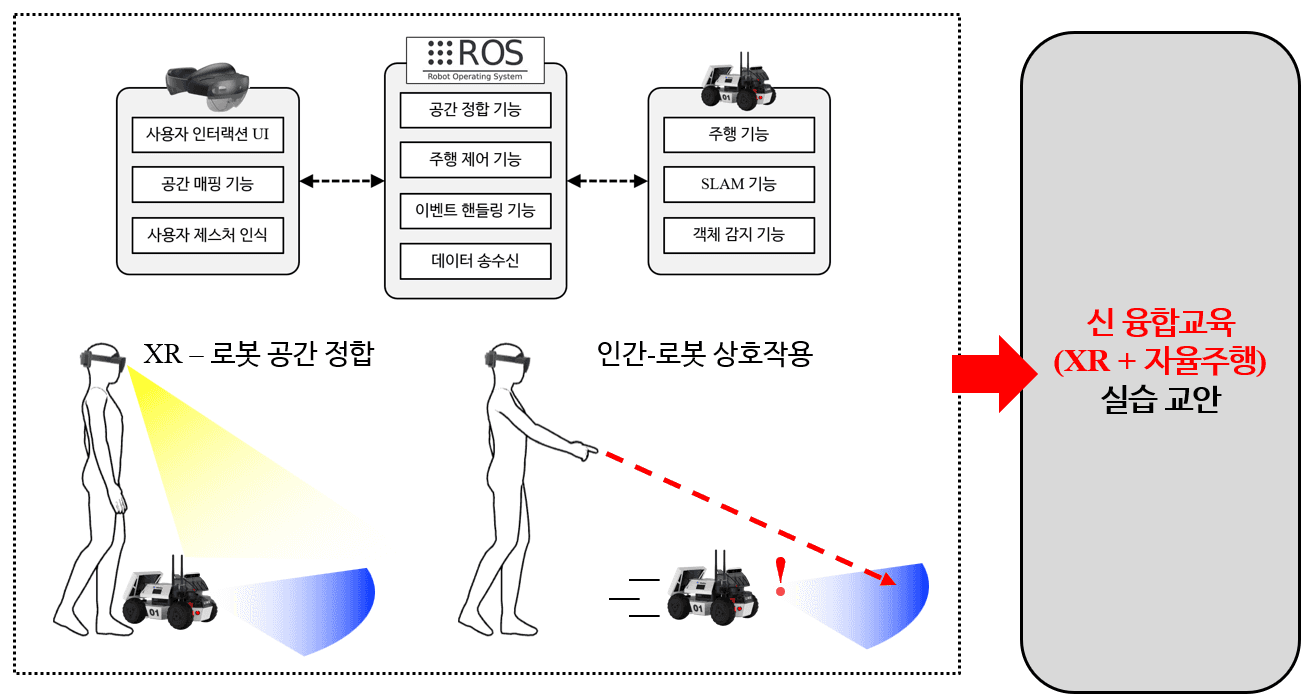
시스템 개요
시스템은 이동로봇(구동부), 인식부, 증강부(투사형 AR 모듈), 보행훈련용 가상현실 콘텐츠로 구성되어, 사용자의 보행을 실시간으로 인식하고 시각적 피드백을 제공함
인식부는 복합 필터(Speckle, 이동 평균) 및 RANSAC 알고리즘을 적용하여 사용자 발 위치를 실시간으로 추적함
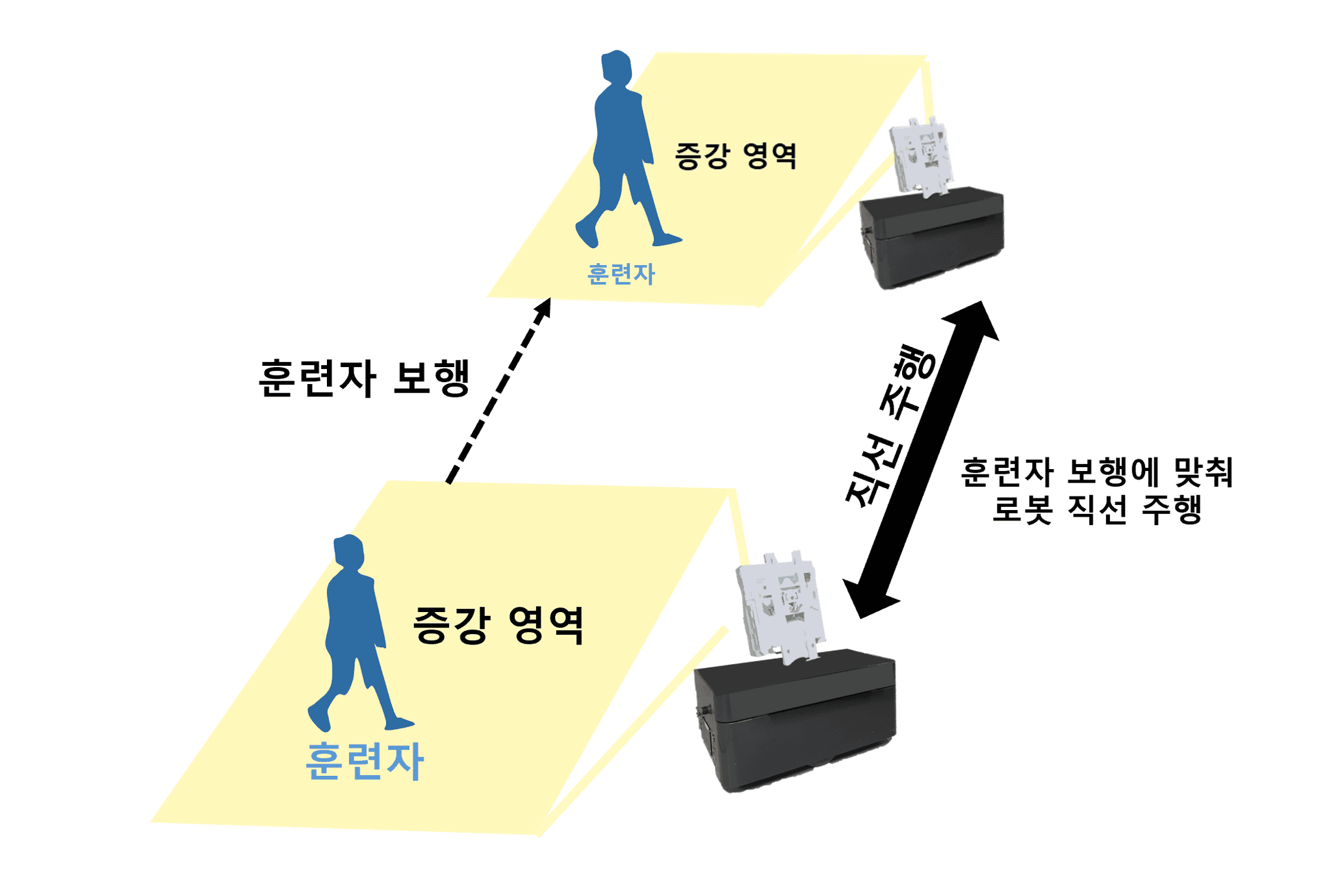
구동부는 사용자 보행 속도에 맞춰 거리를 유지하며 치료사를 대신해 사용자의 보행 경로를 따라 이동함. 또한 비상 정지 및 감속 보정 기능으로 안전성을 확보함
증강부는 로봇 이동 거리 데이터에 기반해 화면 보정 알고리즘을 수행, 시각적 왜곡 없이 안정적인 AR 투사 환경을 유지함. 빔 프로젝트를 통해 바닥에 콘텐츠를 증강함
보행훈련 콘텐츠는 난이도별(초급·중급·고급)로 구성되어 있으며, 인식된 사용자 발과 증강된 콘텐츠와 인터랙션을 제공함. 이를 통해 재활 치료를 받는 사용자의 흥미와 몰입도를 높임
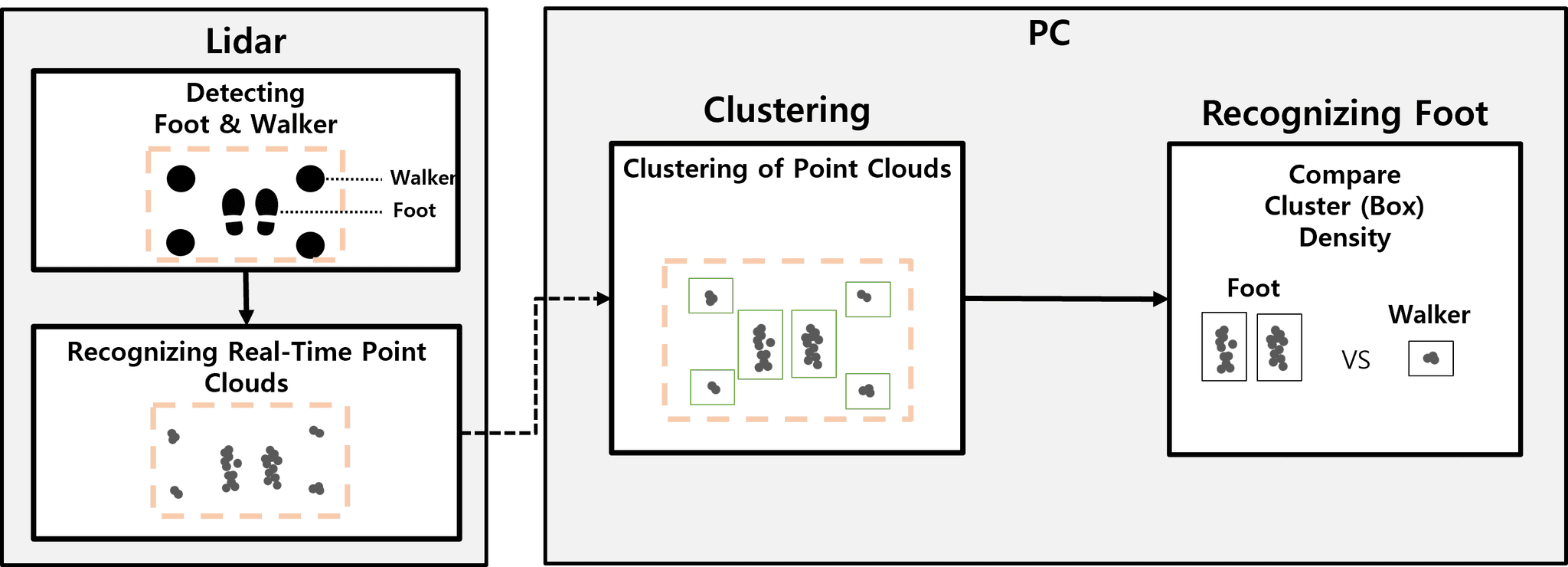
사용자 발 인식
인식부는 Lidar 센서로부터 획득한 포인트클라우드 데이터를 기반으로 사용자의 발 위치를 실시간으로 탐지하고, 보행 궤적을 추적함
수집된 포인트클라우드는 전처리 과정에서 Speckle 필터와 이동 평균 필터를 적용해 노이즈를 제거하여, 안정적인 데이터를 필터링함
필터링된 포인트클라우드에서 발 영역 클러스터링을 수행하여 사용자의 실제 보행 위치를 식별함
각 클러스터의 밀도(Density)를 비교하여, 발(높은 밀도)과 보행기(낮은 밀도)를 구분함
이후 RANSAC 기반 평면 보정 알고리즘을 통해 바닥면과의 정렬을 수행하고, 오인식 및 드리프트 현상을 최소화함
다양한 조도 및 바닥 재질 환경에서 인식률 실험을 수행하여, 최적 조건(조도 50~150 lux, 교차율 30%)을 도출함
이를 통해 사용자의 발 위치를 실시간으로 추적하고, 이동 로봇이 사용자의 보행 속도에 맞춰 이동할 수 있도록 함
콘텐츠
보행훈련 콘텐츠는 Lidar 기반 인식부와 연동된 증강형(AR) 인터랙션 콘텐츠로, 사용자의 실제 보행 동작에 따라 실시간으로 반응하도록 설계됨
콘텐츠는 사용자의 발 위치를 인식하여 보행 가이드(발자국 경로)를 투사하고, 올바른 발걸음 시 긍정적 피드백, 오류 시 부정적 피드백을 제공함
인식된 발 좌표는 보행 가이드 영역과의 교차율 및 유지시간을 비교하여 보행 성공 여부를 판단함
훈련 난이도는 보폭 간격, 보행 너비, 발자국 크기 등의 파라미터를 조정하여 단계별(초급–중급–고급)로 구성됨
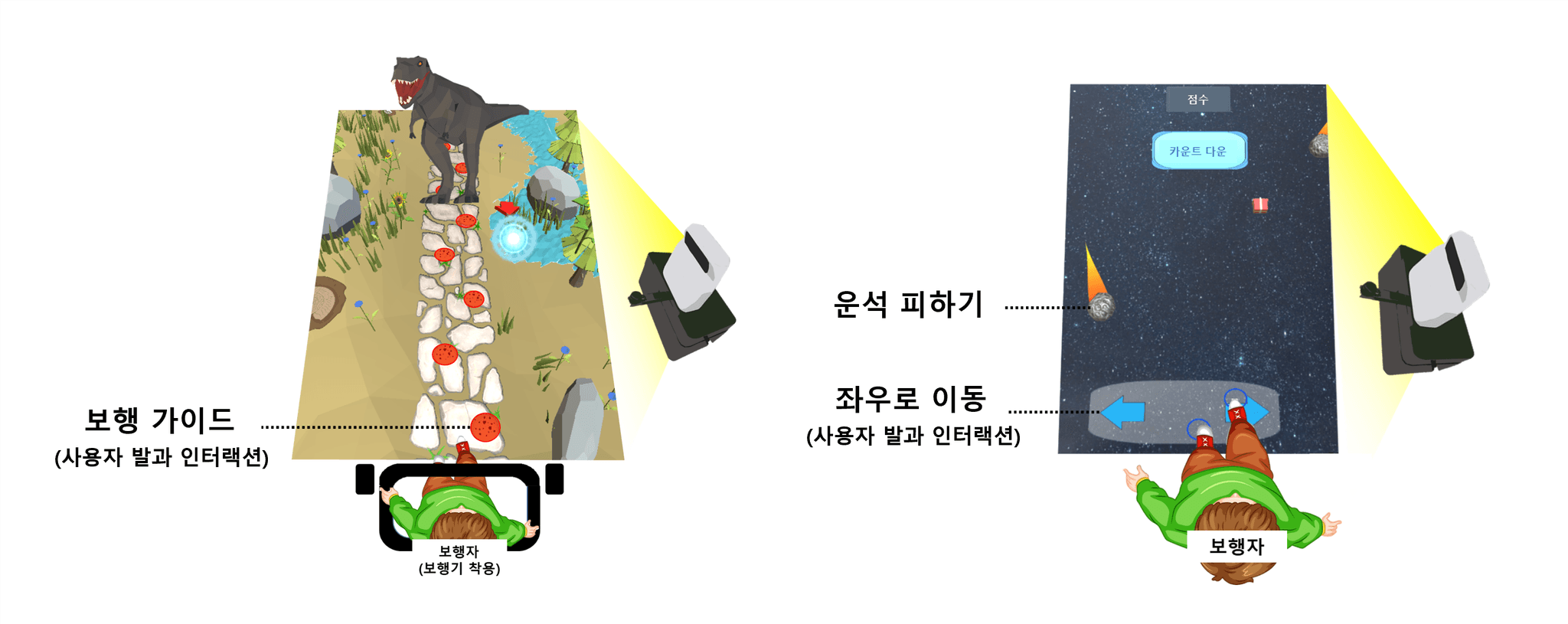
총 3종의 콘텐츠(횡단보도 건너기, 공룡 콜렉터, 운석 피하기)를 개발하여 보폭 조절·순발력·균형 감각 등 다양한 운동 능력을 훈련하도록 설계됨
콘텐츠 (횡단보도 건너기, 공룡 콜렉터)
사용자가 발로 증강된 보행 가이드를 따라 밟으며 보행 훈련을 수행함
콘텐츠 (운석 피하기)
사용자는 좌우 이동을 통해 낙하하는 운석을 회피하며 반응성과 좌우 움직임을 훈련함
각 콘텐츠의 훈련 결과는 웹 기반 콘텐츠 관리 프로그램을 통해 기록·저장되어, 치료사나 연구자가 이전 훈련 이력을 확인할 수 있음
사용자 발 인식률 실험
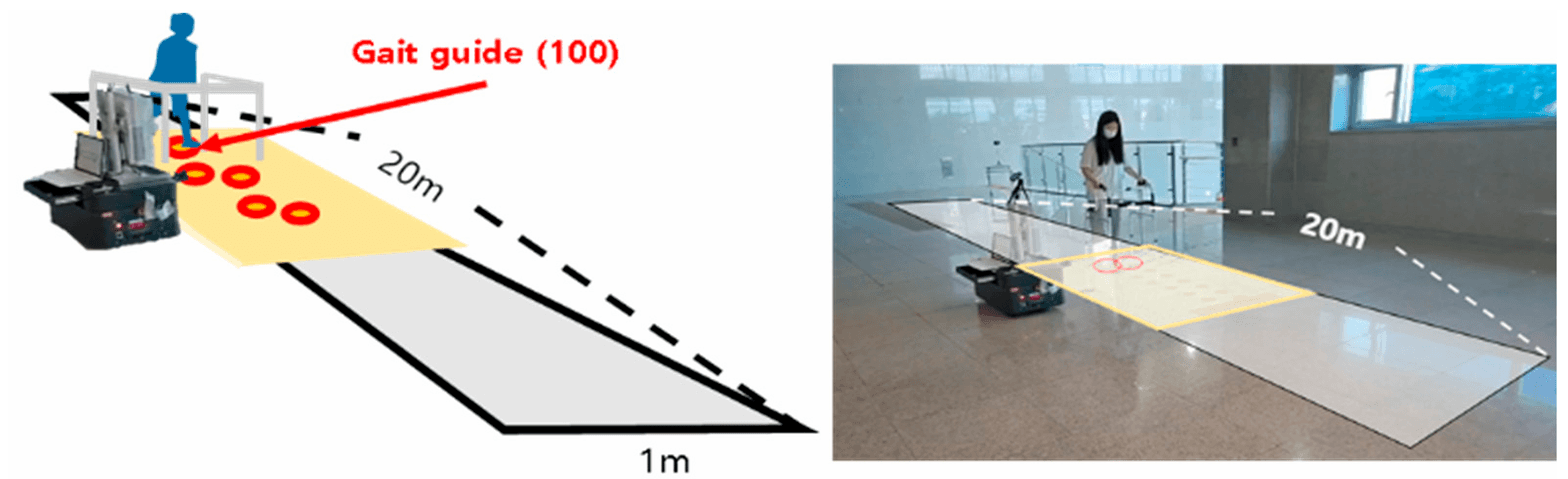
발 인식률 실험은 Lidar 센서 기반 인식부의 보행 인식 성능을 정량적으로 검증하기 위해 수행됨
실험은 20m 구간 내에 100개의 증강 발자국(보행 가이드)을 배치하고, 사용자가 이를 밟을 때의 인식 성공·실패를 측정하는 방식으로 진행됨
보행 성공 여부는 교차율(가이드 영역 대비 교차 면적 비율)을 기준으로 판정함
사용자는 보행 가이드를 밟으며 보행 훈련을 수행함
총 100개의 보행 가이드 중 콘텐츠 내에서 피험자가 밟았다고 인식된 보행 가이드 개수 확인
다양한 조도(50~150 lux) 및 교차율(30% 이하) 조건에서 총 10명의 피험자를 대상으로 실험을 수행함
실험 결과, 인식률은 97% 이상으로 목표 성능을 달성
개발결과
역할
본 연구에서는 석사과정 연구원으로 참여하여 이동로봇 기반 보행훈련 시스템 콘텐츠 개발 및 실험 수행을 보조하였다. Lidar 센서를 활용한 발 인식 알고리즘 검증을 위한 실험 과정(설계 및 피험자 모집, 데이터 수집 등) 맡았으며, 보행훈련용 가상 콘텐츠 아이디어 도출 및 개발을 수행하였다. 이러한 경험을 통해 Lidar 기반의 포인트클라우드 클러스터링 개념 및 구현과 가상 콘텐츠 개발, 개발된 시스템의 검증을 위한 실험 프로세스 설계 및 수행 절차를 익힐 수 있었다.
본 연구는 국립재활원의 "이동로봇을 활용한 보행훈련용 시스템 중개연구" 연구개발용역 과제로 수행되었습니다.